ok, i unhooked mine and opened it back up
the voltages into no load are 41.6v on yellow 19.75v on blue, if yours are anywhere close to this, the transformer is still good.
i would check voltages on the transformer outputs, check all the diodes, and look for bad solder joints. my bet is on the diodes.
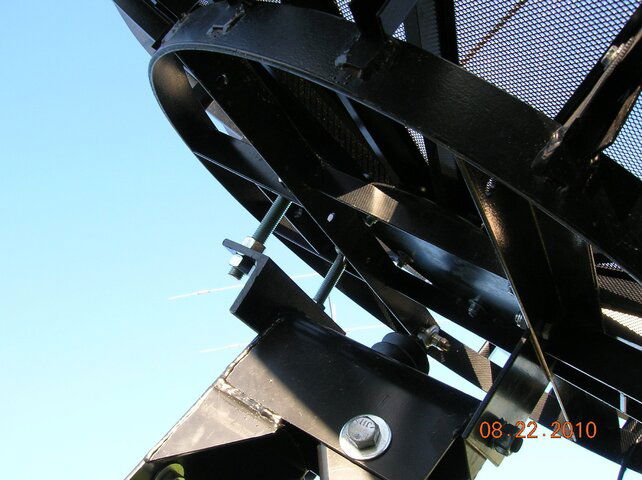
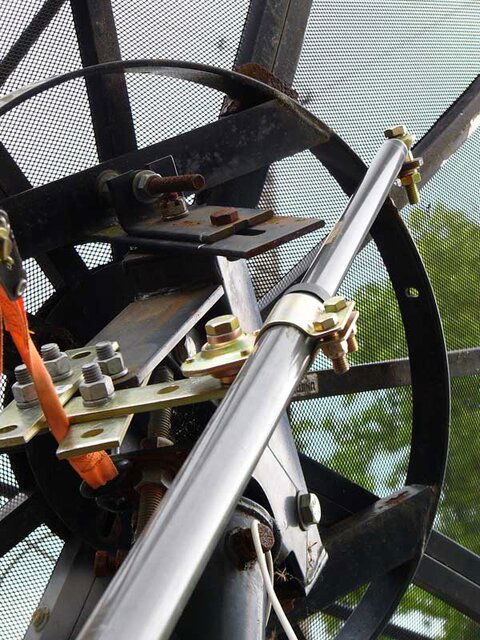
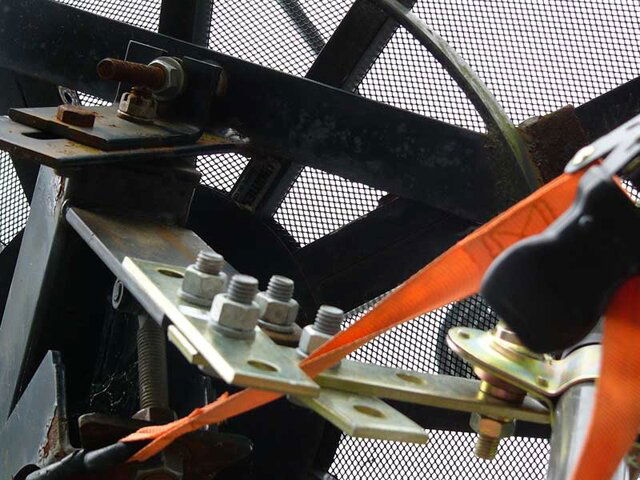
and on your dish, your pivot point and connect point for your actuator do look very close.
i bet a piece of angle iron bolted to the back of your mount to extend it out further would work great. you would likely see more accuracy and it would draw less current at the same time. one thing to remember when doing this is that if you move it out too far, you could loose some sats at the end of your arc, so it would be a good idea to get a long actuator.
also, i might add that i have never seen the von weise actuator use anywhere near the 2.75 amp max rating, even with the relay circuit and insane voltages being run into it.
Hope this helps,
Denny